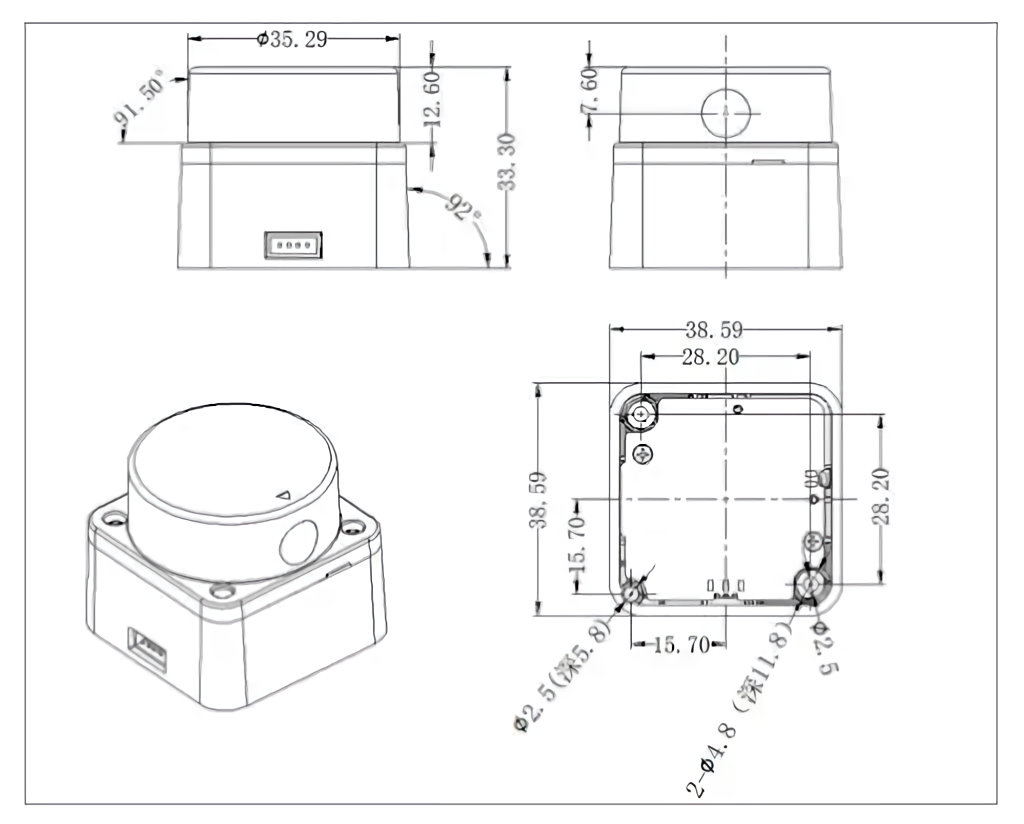
UR-12 Short Range LiDAR

| Range | 12 m |
| Cabling | USB-to-Serial |
| Based on | LDRobot LD-06 |
| Input power voltage | 4.5V-5.5V (USB) |
| Scan frequency | 5-13Hz |
| Min detection distance | 0.02m |
| Max detection distance | 5-12m |
| Scan angle | 360 degree |
| Ranging method | TOF flight time ranging |
| SKU | SRL00001 |
When changing out sensors makes sure to disconnect the RED battery cable from the batteries and wait 2 minutes so high voltage and current are not linked with the main board!
Installation
Plug the USB cable (on the picture above) into any of the Raspberry Pi USB port (NOT the MCB ones, those only provide power) and the lidar should turn on automatically when the Pi boots.
On raspberry Pi:
cd ~/catkin_ws/src/
git clone https://github.com/UbiquityRobotics/ur12_lidar.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
catkin_make
source devel/setup.bash
Make sure that lidar launch reflects the device name that the ld06 lidar is registered under and then:
roslaunch ur12_lidar ur12_lidar.launch